|
First Mission:
Our first mission was the escape velocity mission. We first began with the robot starting from the “T” so it would be coming in and hitting at 180°. We couldn’t get it to the top from there, but we could get it 3/4 of the way up. We decided that if it had to start at the base while we were waiting for the design team to make stronger arms and wheels we should code it from the base. We coded it from base and got it 3/4 of the way up again. The design team put a stronger wheel on for more grip and a new arm to hit it with. We tried it from the base with the new add-ons and got it quite far up the tower. Then we had a discussion. In that discussion we talked about the angle it was on and where we lined it up. Every time we marked where we wanted it and adjusted the arms so they were even. We tried it again and made it to the top, although it still isn’t consistent. Click on the video above to see our first successful mission.
Click on the video below to see one of our unsuccessful missions. |
Describe some of the other missions that you tried.
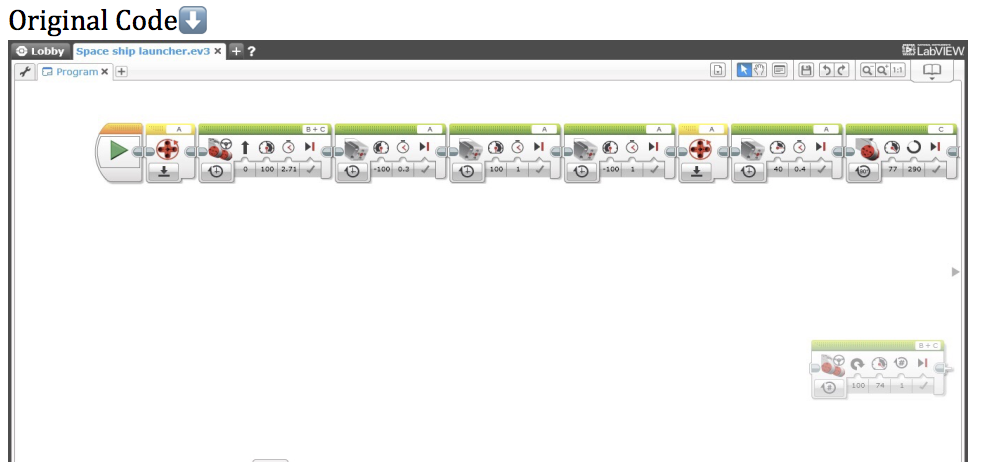
We also had a go at Mission 7 which was to do with food manufacturing. The robot had to push the bar until the spinner stopped at the green section. The third mission we had a go at was the observatory challenge. The robot had to push the pointer along the bar. It was important that it didn't overshoot the target or undershoot. The following images show examples of our code using Lego Mindstorms software. The first image shows the code with the Gyro sensor. The second image shows the code without the gyro sensor. The gyro sensor helps the robot stay in a straight line and turn in particular angles. 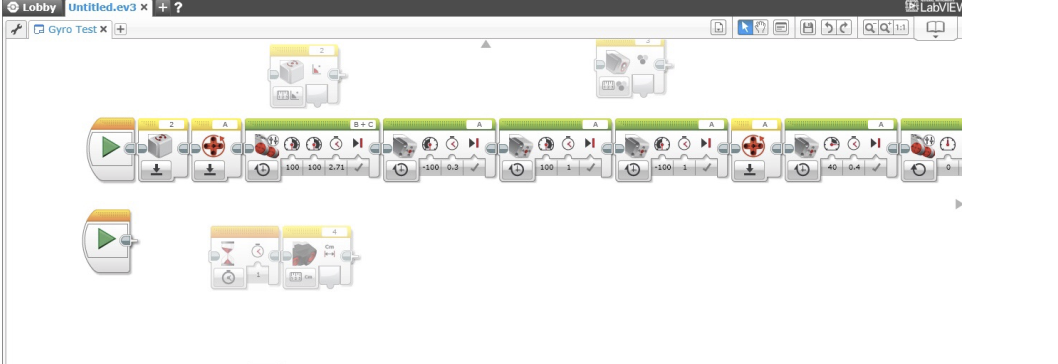
|